I’ve been thinking of different ways to speed up the PiDash build but it all leads me to either writing my own software that accesses a RS485 CAN HAT which connects to the CAN bus on the MS3 ECU or an Arduino setup. For now my end game is to have a text only display. I just need something that is instant on and has a layout of what I deem is important to me.
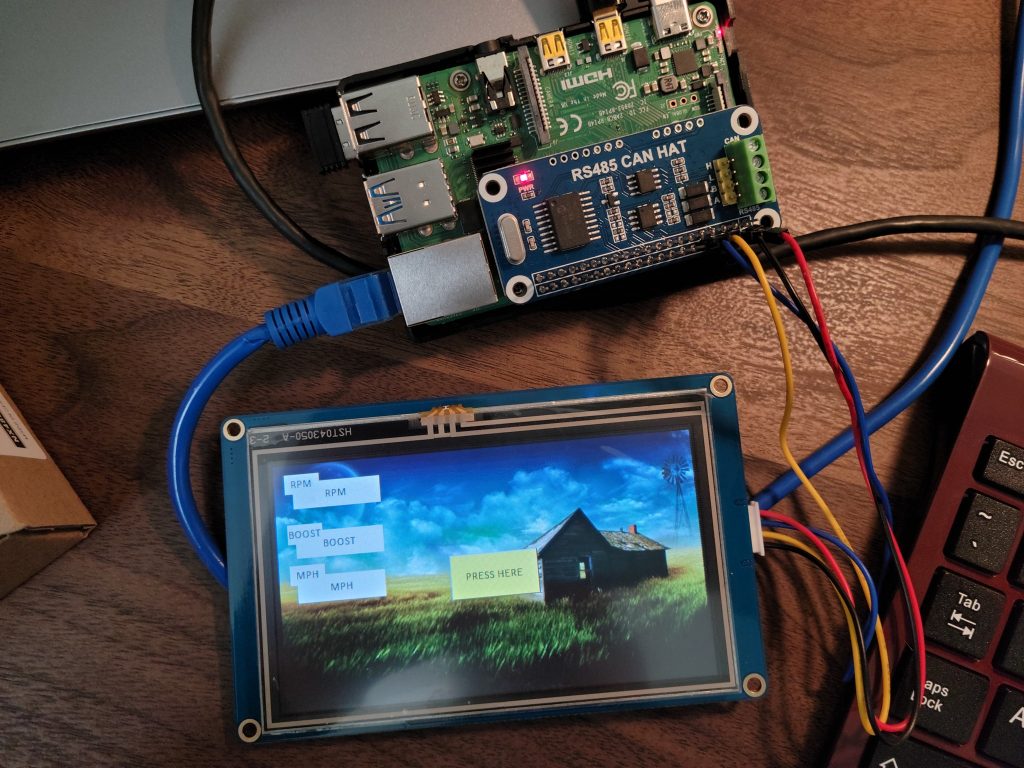
I decided to buy a RS485 CAN HAT, Nextion 4.3″ display and hooked it all up to my Pi 4. I am able to send data to the Nextion display using C code. Getting some updates done on the turbo Camaro so I dont have an ECU to plug into. I bought a second RS485 CAN HAT so I can test the CAN functionality to make sure it works. In the above pic I added a picture I found on google and some text fields along with a button. All if it works with custom C code I’ve written so thats cool. There are bigger displays but I bought the 4.3″ for now.
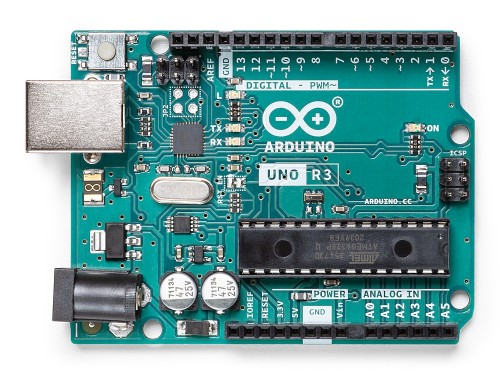
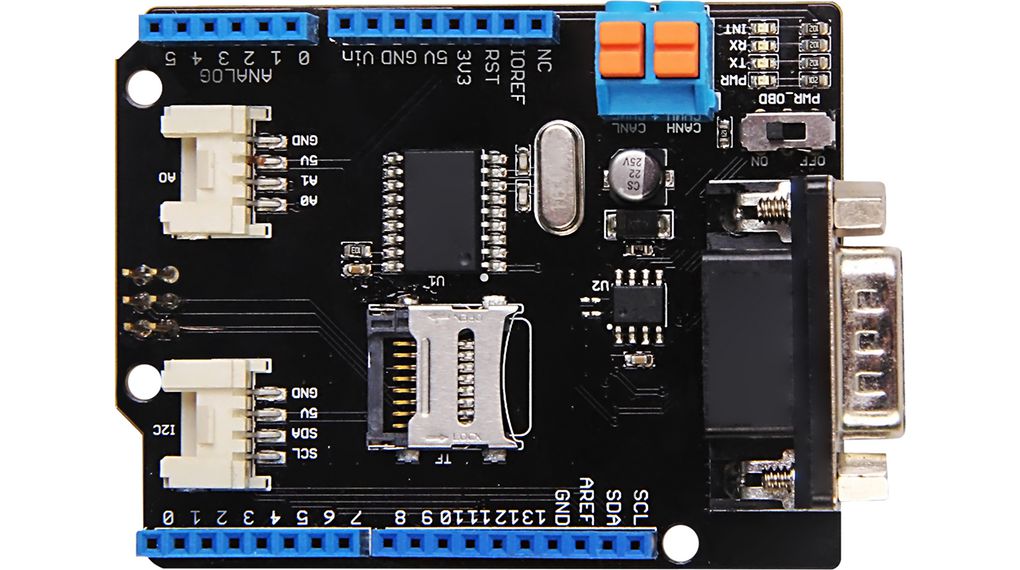
Also bought an Arduino UNO and an CAN-BUS Shield v2 for it but it hasn’t arrived yet. “Patiently waiting” 🙂 . The CAN-BUS Shield v2 will plug on top of the Arduino. I’ll use the CANL and CANH on the CAN-BUS Shield and wire it to the MS3’s CANL and CANH. I’ll update my PiDash Facebook page with its status. Once its complete I’ll give out my code for free and show you how to build it. If you’re wondering why the Arduino, its because its instant on. No operating system to load up like Linux on the Pi4 build.